
The MPU3050 is a three-axis gyroscope chip developed by Invensense. Its primary function is to measure angular velocity, allowing it to determine the motion state of an object, which is why it's also referred to as a motion sensor. This makes it widely used in various applications such as robotics, gaming, and wearable devices.
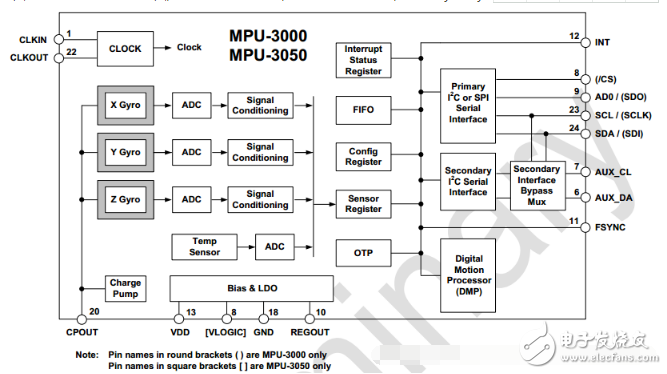
The following diagram shows the system block diagram of the MPU3050. The chip features one interrupt pin that can be controlled via I2C to read the xGyro, yGyro, and zGyro values.
Silicone Wire,Power Cord,High Temperature Line,Rubber Wire
JIANGSU PENGSHEN HIGH TEMPERATURE WIRE CABLE CO., LTD. , https://www.pengshencable.com