

Since the development of drones, there has been a certain bottleneck in the evolution of endurance and functionality. As a result, mainstream consumer-grade drone manufacturers in the world have started to use safety as the starting point for the next products, and have developed their own homes. The "Obstacle Avoidance".
Among the difficulties faced by all drones, "obstacle avoidance" belongs to one of the highest requirements for technology and accuracy.
Having the UAV autonomously perceive the surrounding environment and make plans for the next flight trajectory, this seemingly simple matter is a great challenge for drones. To solve this problem well, drone manufacturers themselves need to There is enough technology accumulation in computer vision, ultrasound, radar positioning and so on.
So, what kind of automatic obstacle avoidance systems are used in mainstream consumer drones such as Dajiang, YUNEEC, and Parrot?
Soon YUNEEC Typhoon H - Compound obstacle avoidance
Early in the CES at the beginning of the year, Yu Xiang YUNEEC demonstrated its indoor obstacle avoidance system with Intel RealSense sensor. Until recently CES Asia, this consumer-grade product Typhoon H officially unveiled and demonstrated its latest outdoor compound. Obstacle avoidance system.
If the previous indoor obstacle avoidance speech was a concept that was not thought of by the intelligence of drones, then compared with the current concept of obstacle avoidance, this realization of high-precision identification and further avoidance of obstacles is It is the flying of drone technology in intelligence.
In the actual demonstration, Typhoon H Realsense with the barrier system enabled can successfully identify and avoid trees in the scene during the following process.
Typhoon H Realsense version of YUNEEC Soar has ultrasound, visible light, and structured light compound obstacle avoidance. Typhoon H has two round holes at the front of the fuselage that are ultrasonic sensors that can calculate the distance to obstacles by the method of sending and receiving ultrasonic waves.
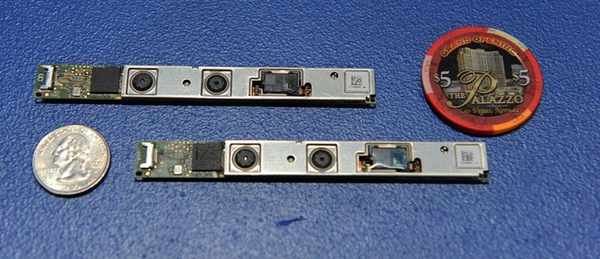
The long strip of objects under the two round holes is the source of the typhoon H black technology title - Intel RealSense module. The module uses Intel RealSense technology to integrate information from two infrared cameras, an infrared emitter, and an RGB standard camera onto a nail-sized image processor to further fine-tune the surface of the object. Modulus, constructing three-dimensional spatial information.

When there is plenty of natural light (daylight), Typhoon H Realsense can identify obstacles of about 10 meters through the RealSense module and distinguish their shapes and positions. At night, Typhoon H Realsense can also sense obstacles of about 5 meters with the aid of active infrared emitters.
Dajiang Elf Phantom 4 - Binocular Ranging Method
On March 5 of this year, Dajiang officially released a brand-new Elf4, fulfilling the automatic obstacle avoidance function. The principle is binocular distance measurement. In a well-lit environment, the detection distance is between 0.7 m and 15 m, and the flying speed of the drone can be controlled according to the speed of the flight. The stopping time can be adjusted to avoid collision.
It should be noted that Phantom 4 does not use omnidirectional obstacle avoidance and there is no ultrasonic sensor. At present, it can only achieve detection in front of it. At the same time, based on this technology, Phantom 4 can automatically plan evasive routes under certain conditions through visual sensors and software algorithms.
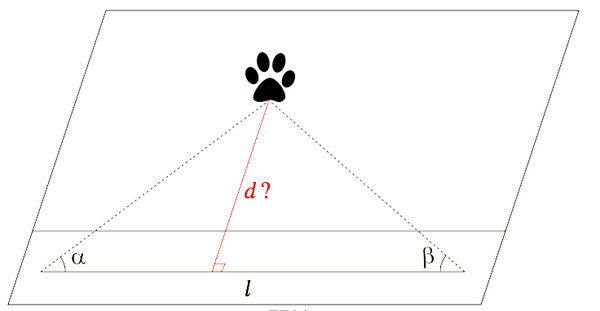
The so-called binocular stereo vision, somewhat similar to the principle of the human eye to estimate the distance, using two different image sensors, the distance between the fixed, measuring the angle between the object and the sensor, known distance between the two sensors and The angle between the object and the two sensors can calculate the distance between the object and the drone based on the triangulation theorem.
The binocular stereo vision algorithm consists of a large number of algebraic equations. The amount of data processed is huge and requires multiple top computers to perform collaborative calculations. Therefore, how to reduce processor energy consumption and improve computational performance has become a lot of drone manufacturers. the problem we are facing.
Zero Xplorer 2 - Lidar TOF
TOF is a shorthand for Time of Flight. It roughly means that according to the flight time, the basic principle relies on the sensor to emit a certain frequency of infrared/laser signal, and then calculate the flight time of the signal according to the phase difference between the reflected signal and the original signal. Convert the distance from obstacles.
In the hovering state, the TOF system keeps rotating fast and rotates 2-5 times per second. By rotating, it is possible to complete a quick scan of the 360° range within the surrounding effective radius in a short period of time, thereby finding obstacles at a relatively high speed, and then issuing an instruction to adjust the position of the flight control system to perform obstacle avoidance.

In flight, the TOF system stops spinning and only emits light in the forward direction. In the fixed direction, the effective distance in the outdoor can be increased to 8-10 meters. One second of reaction time after the detection of an obstacle, the drone can use a large acceleration to stop the advance.
Take the zero-degree Xplorer 2 this product, which uses the optical phase detection, the sensor resembling a small mushroom at the top emits a laser radar, rapidly scans the surrounding environment at a rate of 360° at a rate of 50 times per second, and draws a 3D model. The three-dimensional contour of the object is translated into the language understood by the machine.
The method of TOF laser radar is more mature, but the fact that light waves are easily disturbed cannot be ignored. The light emitted by the system must avoid the main energy band of sunlight, so as to avoid direct interference and reflection of sunlight on the obstacle avoidance system.
to sum upThe above obstacle avoidance method basically represents the current mainstream consumer-grade UAV solution to obstacle avoidance. Each of them has advantages and disadvantages, but all of them are still at a relatively elementary stage. The applicable scenarios and the identification of obstacles There is still much room for improvement in anti-jamming capabilities.
Among them, Binocular Ranging and TOF Lidar rely mainly on sensors. The core of Typhoon H equipped with Intel Realsense is to digitize the surrounding environment through computer vision in order to plan obstacle avoidance for the flight route.
Obstacle avoidance technology for drones is like AI brains for robots. It is a revolutionary innovation for the entire drone industry. On the one hand, it can improve the safety index of drones, and on the other hand it can also Reduce the difficulty of drone operation.
* 1.The cooler features the 9-blade fan, powerful heat dissipation, turbine exhaust technology for quickly dissipating the mobile
phone heat.
* 2. Low noise operation, does not interfere with voice chat, frequency conversion DC motor, stable wind for better use.
* 3. The cooler is small and convenient, whose size is about one-third of the size of the mobile phone, making gaming perfect.
Gaming Cooler Fan,Gaming Cooler Mobile Phone,Game Cooler,Mobile Controller
MICROBITS TECHNOLOGY LIMITED , http://www.hkmicrobits.com