
1 Composition of visual recognition system
The visual recognition system of the dicing machine is a computer-based real-time image processing system. As shown in Figure 1:

It is composed of optical lighting system, CCD camera device, image processing software and so on.
The purpose of the recognition system is to achieve automatic alignment. On the premise of ensuring the accuracy of the worktable, high-precision image processing algorithms play a decisive role in the accuracy of the visual automatic alignment system. The core part of this is the pattern recognition algorithm. Currently commonly used recognition methods are statistical pattern recognition method, feature extraction method, neural network recognition, template matching method and so on. China started relatively late in this field, and its scientific research strength is mainly concentrated in some colleges and universities, focusing on theoretical research, and the marketization effect is not obvious. This makes the development speed of the machine vision field lag significantly behind the European and American countries.
2 Technical route selection
In view of the current situation at home and abroad, when we set out to build our own vision recognition technology framework, the starting point was how to use existing mature resources and theoretical algorithms as much as possible according to the characteristics of the equipment to establish a set of efficiency and practical integration. Set of vision algorithms, and then form its own machine vision library for automatic dicing machines.
I have tried many ways, including cooperation with foreign machine vision companies to customize their complete set of visual recognition systems according to specific functional module requirements. But the problem encountered is that it has to bear the expensive development costs and high profits of foreign companies, which leads to a linear increase in equipment costs, and it is very likely that our own technical secrets will be revealed during the cooperation process. Practice has proved that this way is not feasible. It is more appropriate to purchase a software development kit from a foreign vision company for secondary development than the previous method, and the technical difficulty is also less. However, it is also faced with the situation that the software development kit is not targeted, the effect in actual use does not fully meet the requirements of the site, the cost of a single device increases and the problem cannot be solved. After continuous exploration and comparison of several common algorithms in today's industry, we finally decided to use the template geometric feature matching algorithm based on the Open CV visual function library on the fully automatic dicing machine.
Open CV is Intel's open source computer vision library. It is a cross-platform vision function library composed of middle and high-level APIs. It consists of a series of C functions and a small number of C ++ classes. It implements many general algorithms in image processing and computer vision. This avoids our repeated research on some mature low-level algorithms and saves a lot of time. More importantly, it is free for non-commercial and commercial use (FREE), and will not cause pressure on our equipment costs. The geometric feature matching of the template is a new visual positioning technology that appeared on the market in the late 1990s. It is understood that many well-known semiconductor equipment manufacturers in the world including DISCO in Japan, Tokyo Precision, and K & S in the United States have adopted related technologies in the field of their main equipment vision. Unlike traditional gray-level matching, geometric feature matching involves setting the interest domain and learning the geometric features of objects in the interest domain, and then looking for similar-shaped objects in the image. It does not depend on special pixel gray levels, which guarantees in principle It has some advantages over traditional visual positioning algorithms. This algorithm has been verified during the development of the fully automatic dicing machine. The application of this technology improves the visual recognition efficiency and automatic alignment ability of the automatic dicing machine, so that when the conditions of the workpiece angle, size, lightness and darkness are changed, the object can still be accurately positioned to achieve automatic alignment and scoring cut.
3 Identification system design
3.1 Design process
The design structure of the visual recognition system is basically similar, the key lies in the choice of recognition algorithm, the design structure flow of the scriber visual recognition system is shown in Figure 2:

In the application process of the algorithm, taking into account the actual situation of the working site of the dicing machine, in order to effectively extract the feature points of the pre-stored template image, we preprocessed the obtained template image of the cutting workpiece, so as to extract the Geometric features, these pre-processing mainly include reducing and filtering the noise in the image, enhancing the geometric feature points to be matched in the image, etc. Among them, filtering and segmentation are two important steps before extracting the geometric features of the pre-template image.
3.2 Filter design principles
Generally speaking, live noises appear as high-frequency signals in the image, so the general filter is to reduce and eliminate high-frequency components in Fourier space to achieve the purpose of filtering. However, various structural details in the workpiece to be cut, such as edges and corners, also belong to high-frequency components. Therefore, how to retain the structural features in the image to the maximum while filtering out the noise is always image filtering Main directions in the research.
Linear filters include moving average filters and Gaussian filters. The most commonly used nonlinear filters are median filters and SUSAN (Smallest Univalue Segment AssimilaTIng Nucleus) filters. Among them, SUSAN filtering can save the other structural features of the object while filtering out the image noise. It can meet the effect of smoothing the noise of the positioning template image in the automatic alignment system of the automatic scriber. The SUASN method is a general term for a class of image processing algorithms, including filtering, edge extraction, and corner extraction. The basic principles of all these algorithms are the same.
SUSAN filtering is essentially weighted average filtering, and the similarity test function is its weighting factor. Equation (1) defines the similarity test function, which measures the similarity between the pixel S [i, j] and each pixel S [im, jn] (m, n is the offset) in the domain. It can be seen that the similarity measurement function not only compares the difference in gray value between S [im, jn] and S [i, j], but also considers the distance between S [im, jn] and S [i, j] Impact.

In the formula: S [im, jn], S [i, j] is the gray value of the pixel, T is a threshold to measure the similarity of the gray value, and its value has little effect on the filtering result. Among them: θ can be considered as the variance of the Gaussian smoothing filter. A larger value of θ can obtain a better smoothing effect. A smaller value of θ can maintain the details in the image. After many experiments, we think that 4. O is more appropriate.
The filter function defined by the similarity measurement function is as formula (2):
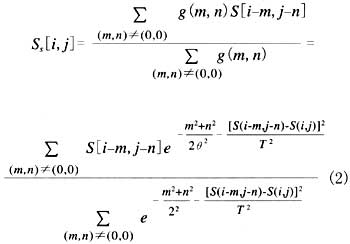
In the formula: S, [i, j] is the gray value after pixel filtering. It can be seen from equation (2) that the weight of a large degree of similarity is large, so the influence on the filtering result is large, and on the contrary, the influence is small. SUSAN filtering does not include the center point itself, which can effectively remove impulsive noise.
3.3 Image analysis algorithm selection
After filtering to remove on-site noise, the next step is to separate the image into meaningful regions that do not overlap with each other, and each region corresponds to the surface of an object. The basis for classification is the spectral characteristics, spatial characteristics, gray values, and colors of pixels. This is actually an important part of the transition from image processing to image analysis, and it is also a general computer vision technology. Algorithms for image segmentation can be divided into two categories: gray-scale threshold segmentation based on metric space and segmentation based on spatial region growth. For the automatic alignment system of the full-automatic scriber, the grayscale threshold segmentation method based on the metric space is more suitable. This is equivalent to binarizing the image. The threshold is generally calculated from the grayscale histogram of the image. We use an iterative algorithm to calculate the threshold for the bimodal histogram. The effect is quite satisfactory. The iterative algorithm is a method to calculate the segmentation threshold for the bimodal histogram. First determine the maximum and minimum gray values ​​Mmax and Mmin in the image, so that the initial threshold is:

According to T, the image is divided into two parts, the target and the background, and the average gray value of the two parts is obtained:
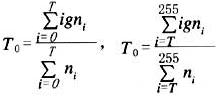
Among them: i is the gray value, ni is the number of pixels whose gray value is equal to i, and thus a new threshold is obtained:
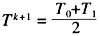
If: Tk + 1 = Tk, the iterative process ends, otherwise continue.
The above image preprocessing process can be well realized by using Open CV vision function library.
The geometric feature point set is a set that can correctly reflect the location points of the positioning marks, and the choice of features has an important influence on the final template matching. The greater the number of geometric feature points, the higher the matching accuracy. But the speed will be relatively slow. The smaller the number, the worse the matching accuracy. But the speed will be relatively fast. Therefore, we tried as many times as possible to select the most suitable geometric feature points, taking into account the matching speed and accuracy. Under the application background of this system, it is a good choice to locate the geometric edge points of the template. In order to extract the geometric feature point set of the positioning template, the image is first segmented using an iterative algorithm, and then the geometric edge points of the positioning template are obtained using the SUASAN edge and corner extraction algorithm.
3.4 The principle of geometric edge corner extraction
SUSAN geometric edge extraction is to calculate the pixels in a window of a given size to obtain the initial response of the corner point at the center of the window, and then find the local maximum value in all the initial responses to obtain the final geometric edge point set. The algorithm is as follows:
(1) Calculate the number n (x0y0) of pixels in the window whose gray value is similar to the central pixel of the window by the following two formulas:

(2) The initial response of the corner point is obtained by the following formula:

(3) Repeat (1) (2) to get the initial response of the corner points at all pixels in the image, and finally find the local maxima to get the edge point set and the position of the corner point. The geometric threshold has a certain effect on the output result. It not only affects the number of output corners, but more importantly, it also affects the shape of the output corners. For example, when the geometric threshold is reduced, the detected corners will be more sharp. The grayscale difference threshold T has little effect on the output corner geometry, but it will affect the number of output corners. Because the grayscale difference threshold defines the maximum grayscale change allowed in the window, and in the cutting workpiece, the grayscale change is the largest at the fusion of the graphic template and its background image, so when the grayscale threshold is reduced, the algorithm can detect The smaller geometric changes in the edges of the image, output more corner points.
Obviously, in the automatic alignment system of the dicing machine, if the geometric feature points of the template image are used as the basis, the number of feature points will be significantly reduced, the calculation time is also greatly shortened, and the speed of automatic alignment can be greatly improved .
4 Conclusion
The above algorithms are all well implemented on the basis of the Open CV vision function library. The entire image processing process is completed on the PC and is implemented using VC ++ 6.0 development tools. After continuous field experiments, we finally believe that: based on the 0pen CV visual function library, after SUSAN filtering, iterative segmentation and SUSAN geometric edge corner extraction algorithm, the feature point effect of the positioning template image is ideal, it not only fully retains the graphics The contour feature also greatly reduces the number of feature points, and can effectively improve the accuracy and speed of automatic alignment of the image matching of the dicing machine.
12V UPS Charger, Restorer and Tester 3-in-1 Recovery system , is fit for 12V/36 Ah~300Ah lead-acid battery banks, With digital pulse charger, adjustable restorer and adjustable discharge Tester, high-performance of recover battery, convenient and reliable. Mainly used in the UPS industry of Wind and Solar energy storage battery, UPS Back up power system, Telecom base site battery , State Grid and Military battery for sudden affair, etc. It has been selected as a approval item of Chinese military cooperation products list, and as an important part of the military emergency combat system, as well as reducing a large number of military batteries back up power purchase cost than before.
This 3-in-1 integrated Recovery system is composed of 3 parts and a professional standard restore process: 1) 12V Battery Restorer Device(36~300Ah); 2) 12V Battery Digital Pulse Charger; 3) 12V Battery Discharge Tester. It is applicable to all of Lead Acid UPS Battery(AGM, GEL, VRLA, Flooded, Dry, Deep cycle and Stationary), and widely used in 12V (36~300Ah) cell batteries.
1) Digital pulse charger
4 Pulse charge channels , each channel have three ranges :10A, 15A, 20A , Select the right charging current according to the capacity and conditions of batteries , the system have a special IC to control automatically recharging without on duty. The multiple-stage pulse charger has the function of preventing battery dehydrated, preventing overcharged, and protect battery plate with equalized pulse charging function.2) Non-destructive Smart Pulse Restorer
8 Pulse restore channels for different capacity of batteries: 36Ah~75Ah, 75Ah~120Ah, 100Ah~300Ah. Selecting the suitable range can be ensure better protection of battery plate in restore working, and extend batteries life up to 2 times than before. It is also called Battery Pulse Desulfurizer, Battery Refresher or Sulfuric Crystal Cleaner and maintainer
3) Discharge Capacity Tester
4 discharge channels of detecting and capacity testing , with discharge current range: 0A~ 20A(Output discharge current can be adjusted continuously and input power accurately.), current precision: ±1% and voltage error: 0.05V. Choose the right ranges of discharge current in order to improve the efficiency of battery recovery, Prevent deep discharge and make sure the plates to be protected better.
12V UPS Charger Restorer Tester 3-in-1
12V UPS Charger Restorer Tester 3-in-1,UPS Battery Saver,12V UPS Charger Restorer Tester,UPS Battery Smart Charger and Tester
Shenzhen Daceen Technology Co., Ltd. , https://www.daceen-sz.com