
1 Introduction
Today, digital controllers are widely used in closed-loop control systems such as automatic aircraft landing systems, servo motor motion control, and robotic control systems. If the sampling rate of the digital controller is high, the closed-loop control system can be regarded as a continuous system. In digital controllers with high precision motion, the sample rate is fixed and may be as low as 1 kHz. If the parameter sampling rate of the controller is set too low, the closed loop control system may become unstable, causing vibration.
In terms of vibration suppression, many scholars have considered the vibration suppression strategy mainly from the perspective of control methods. This is due to the influence of factors such as uncertainty and nonlinearity in the system, which causes the vibration suppression performance of the controller to decrease during the control process. In response to the vibration problem of the servo system, domestic experts and scholars have proposed many suppression methods, such as PI/PID control, IIR filter control [5] and acceleration observer [6].
Based on the analysis of the stability of the closed-loop control system, this paper proposes a vibration suppression method for the low sampling rate control system. This scheme is combined with the PI controller to form a vibration compensator. In this paper, the stability of the closed-loop system and the proposed vibration suppression scheme are studied. The effectiveness of the scheme is verified by the MATLAB simulation platform.
2. Stability analysis of the control system
Consider a stable linear system:

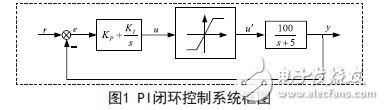
Figure 1 shows a PI closed-loop control system, the system model is a first-order system. The sampling period of the closed-loop control system is h=0.001s.
The parameters of the PI controller are KP=30 and KI=30. The transfer function G(s) of the PI closed-loop control system can be written as:

Calculate the characteristic value of G(s) according to the above formula: λ1 = ? 3004, λ2 = ? The sampling period of the 0.9987.PI controller is h=0.001s, which causes instability of the system. Due to the saturation of the control system, vibrations are generated, which reduces the performance of the system.
3. Design of vibration compensator
Figure 2 is a control block diagram of a PI controller with vibration compensation. In Figure 2, e represents the input signal, u represents the output signal of the PI controller, KP, KI are the proportional and integral coefficients of the PI controller, Ks is the maximum value of the gain, and Ka is the adaptive gain parameter, which determines The convergence rate of the compensation strategy. h is the compensation signal for the proposed strategy. In Figure 2, the vibration suppression strategy includes a dead zone function. When u †e Ks or u “ e Ks , h is non-zero. If the size of u exceeds the absolute value of the product of e and Ks, h is used to cancel e, so that u remains within the upper limit.
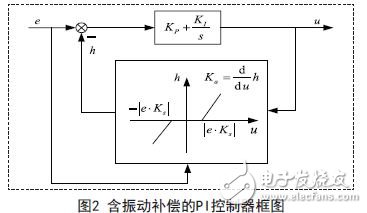
The relationship between the output signal u and the compensation signal h:

Medium Voltage STA Armored Cable
Medium voltage STA cable is a type of Power Cable used for transmitting electricity at medium voltage levels. The armored cable is designed with a steel tape armor layer that provides mechanical protection to the cable against external forces, such as impact, crushing, and abrasion. The armor layer also provides protection against rodents and other animals that may damage the cable.
The medium voltage STA cable is typically used for underground and overhead installations in industrial, commercial, and residential applications. It is suitable for use in harsh environments, including areas with high humidity, corrosive gases, and high temperatures.
The cable is constructed with a copper or aluminum conductor, insulated with XLPE or EPR material. The insulation provides electrical insulation and protects the conductor against moisture and other environmental factors.
The steel tape armor layer is applied over the insulation layer and provides mechanical protection to the cable. It is made of galvanized steel and provides excellent resistance to corrosion.
The medium voltage STA cable is available in various sizes, ranging from 3.3 kV to 33 kV. It is manufactured in compliance with international standards, such as IEC, BS, and ASTM. The cable is tested for quality and safety before it is supplied to customers.
In summary, the medium voltage STA armored cable is a reliable and durable power cable used for transmitting electricity at medium voltage levels. It is suitable for use in harsh environments and provides mechanical and electrical protection to the cable.
Underground Medium Voltage STA Armoured Power Cable,Underground Buried Power Cable,Waterproof Copper Power Cable Wire,Multi Core Medium Voltage STA Armoured Cable,STA Armored MV Underground Cable
Ruitian Cable CO.,LTD. , https://www.hbruitiancable.com